Space Debris Mitigation report
Introduction
This report focuses on space debris mitigation for PocketQube satellites as part of ESA’s FYS4! program. Space debris includes defunct satellites, spent rocket stages, and other fragments orbiting the Earth. As the number of satellites and space missions increases, the risk of collisions and further debris generation also rises. Effective mitigation strategies are crucial for ensuring the long-term sustainability of space activities. PocketQube satellites have gained popularity due to their compact size and low cost. However, their small size makes implementing effective debris mitigation measures challenging. This report addresses these challenges and proposes strategies to minimize debris creation during the operational phase of PocketQube satellites. Given that PocketQubes lack propulsion systems, the report suggests launching them at low altitudes to ensure an orbital decay of less than five years, aligning with ESA’s Zero Debris policy. By analyzing current space debris mitigation practices and considering the specific requirements of PocketQube satellites, this report provides recommendations for launching and operating these satellites to minimize their contribution to space debris. The findings and recommendations in this report will promote sustainable space activities and reduce space debris risks. Implementing these mitigation measures aims to ensure the long-term viability of PocketQube satellites and contribute to a cleaner, safer space environment.
Mission profile
As outlined in the Mission Analysis Report , the ideal altitude range is between 450 km and 500 km, with an orbital inclination close to Polar, which is optimal for Earth observation. While lower inclinations are also feasible, aim for an eccentricity near zero. For further details, please consult the Mission Analysis Report.
Mission requirements
As noted in the Mission Analysis Report, the mission does not have any strict limitations. However, altitudes above 500 km and low orbital inclinations may pose challenges for communication with our ground station located at the Montsec Observatory in Lleida.
Satellite space system description
Overview
Each of the satellites will be equipped with a range of systems, with the only difference being the payloads they use. The structural design is outlined in the Satellite Project file’s Structure section. The other systems include the Power System, On-Board Computer, Telemetry, Tracking, and Communication System, Attitude Determination and Control System, and Payload Systems (VGA, L-band, K-band), along with additional subsystems related to these major components.
Power system
- Energy Harvest Block:
– Includes 3 Maximum Power Point Trackers (MPPTs) to optimize energy generation from the solar cells.
– Equipped with 5 high-efficiency GaAs triple junction solar cells with an efficiency of over 30%.
– Two solar cells are placed in parallel on the X and Z axes, and one on the Y-axis. - Battery Charger Block:
– Manages energy and charges a 3.7V, 1400mAh LiPo battery.
– The power management IC monitors the battery and communicates with the On-Board Computer (OBC)
to adjust operations based on voltage, current, temperature, and capacity.
– Equipped with an NTC temperature sensor and a heater for battery temperature regulation.
– A voltage regulator reduces the battery voltage to 3.3V for the subsystems. - Killswitches:
– Killswitches keep the satellite powered off on Earth and activate once in space, connecting the battery to
the satellite.
Attitude and Orbit Control System (AOCS)
The AOCS will determine the orientation of the satellite in two different scenarios, the first one with direct sun exposition, and the second one without direct sun exposition. In order to obtain the information from the environment it will use a gyroscope and a magnetometer. In addition, it will also use photodiodes and temperature sensors installed on the spacecraft’s lateral boards. Regarding spacecraft control, as detailed in the ADCS section, the only control mechanism available will be orientation adjustment via magnetorquers. These magnetorquers are embeeded in each lateral board and in the bottom board. In the case of the +Y magnetorquer, it is located in an inner PCB inside the Pocketqube structure. The main functionalities of the AOCS are nadir pointing to point the payload at the nadir angle, and the detumbling, to reduce the rotation of the satellite. Regarding the requirements for between the AOCS and the communications antenna, as it is a monopole it does not require any pinting accuracy. For the spacecraft navigation the on board computer will propagate the orbit and estimate the current position of the satellite around the Earth.
Implementation and verification
Mission related objects (MROs)
No objects will be realised from the PocketQubes at any point of the mission.
Small particle release
Similar to the previous sections, the satellites do not have a propulsion system; therefore, no particles larger than 1 mm are expected to be released.
Additionally, the dyneema used for deploying satellite antennas, such as the communication and payload antennas, is designed to remain attached to the satellite after the antenna deployment is completed.
On-orbit break-up risk caused by the system
Due to the compact size of the PocketQubes, especially within the deployer, no fragile elements have been used, minimizing the risk of breakage. Additionally, the satellite’s structure is assembled with screws, which are further secured by helicoils.
Regarding the lateral boards, epoxy is applied to keep the solar panels securely attached to the satellite. The photodiodes on the lateral boards must also pass a vibration test before launch, making the likelihood of breakage extremely rare.
On-orbit collision risk
To analyze the on-orbit collision risk of our platform, the MIDAS tool from DRAMA was utilized. The simulations account for a launch scheduled in Q3 2026 with a mission duration of 3 years, adjust your values to the expected launch date.
The following spacecraft parameters were applied:
| Parameter | Value |
| Semi-major axis [km] | 6871 |
| Cross-sectional area [m^2] | 0.005 |
| Drag coefficient | 2.2 |
| Mass [kg] | 0.234 |
| Solar radiation pressure reflectivity coefficient | 1.2 |
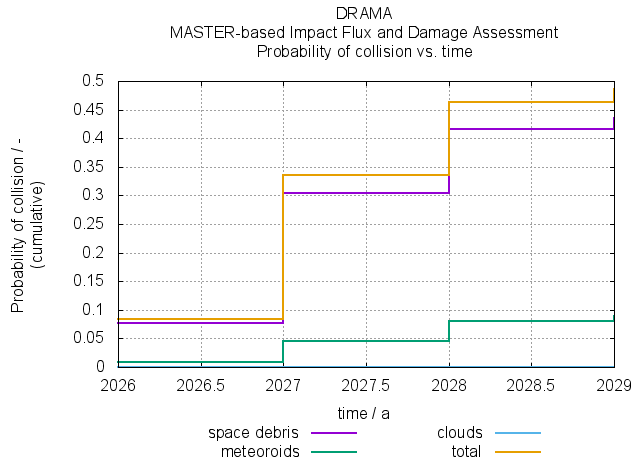
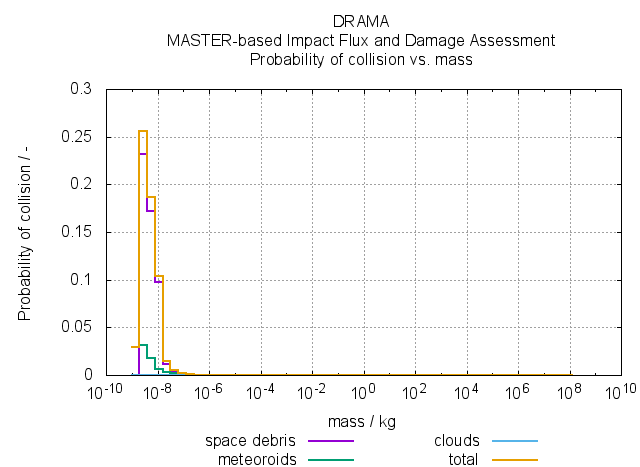
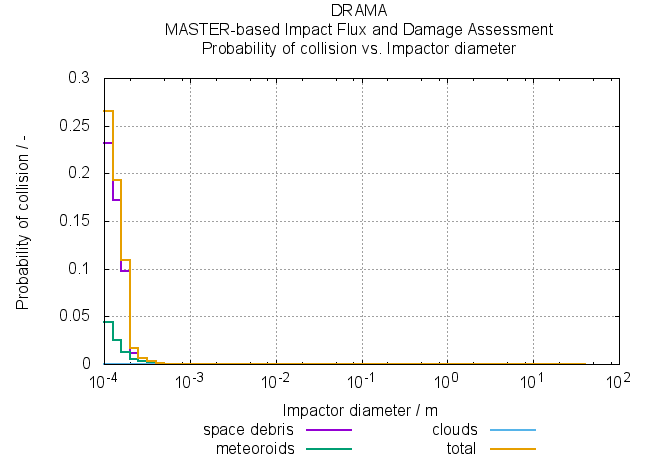
To provide a comprehensive overview of the collision risk, three key figures are presented. The first graph illustrates the probability of collision as a function of time throughout the mission duration. Second graph shows how the spacecraft’s mass impacts the probability of collision, while third graph demonstrates the effect of the spacecraft’s diameter on the collision likelihood.
These figures collectively highlight the main factors influencing the on-orbit collision risk:
On-orbit break-up and vulnerability risk caused by impacts
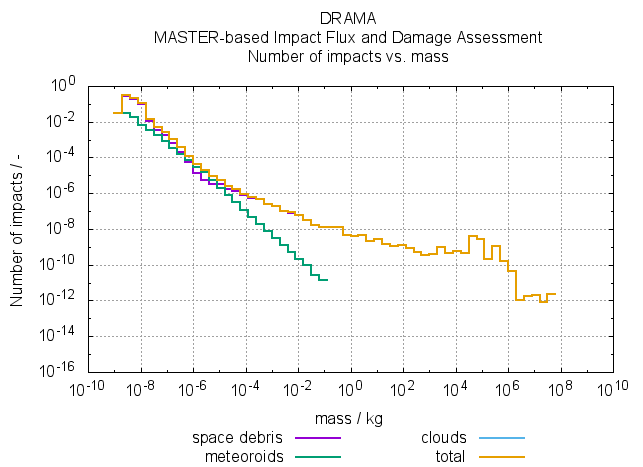
Similar to the approach taken in the previous section, the MIDAS tool from DRAMA was used to analyze the on-orbit break-up and vulnerability risks due to impacts on our platform. The simulations consider a launch planned for Q3 2026, with a mission duration of 3 years.
| Parameter | Value |
| Semi-major axis [km] | 6871 |
| Cross-sectional area [m^2] | 0.005 |
| Drag coefficient | 2.2 |
| Mass [kg] | 0.234 |
| Solar radiation pressure reflectivity coefficient | 1.2 |
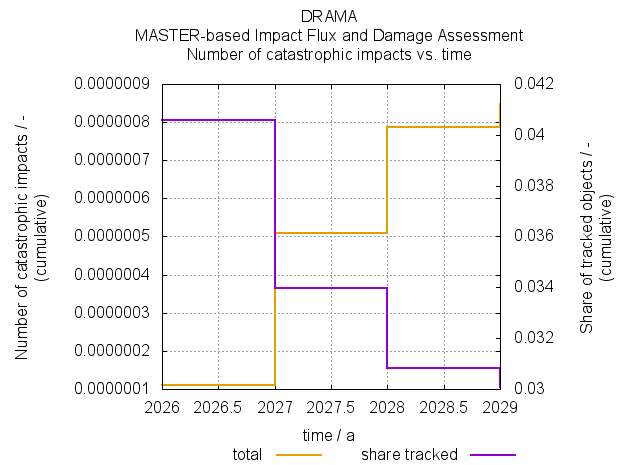
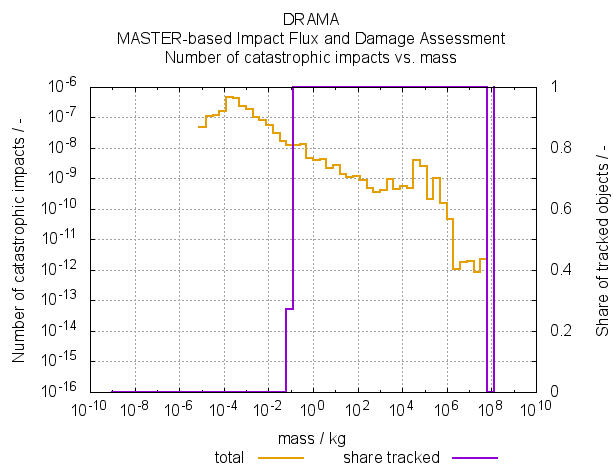
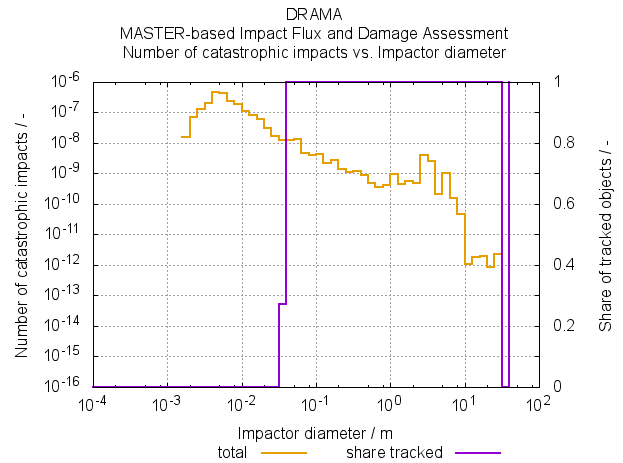
To further analyze the on-orbit collision risk, six additional graphs are introduced. The fourth, fifth, and sixth graphs show the number of impacts over time, as well as the influence of mass and diameter on the number of impacts, respectively. The seventh, eighth, and ninth graphs illustrate the number of critical impacts, again as a function of time, mass, and diameter. These graphs provide a deeper understanding of both the total number of impacts and the severity of critical impacts across various parameters.


Disposal
Due to the design of our satellite, it lacks a propulsion system. Consequently, both of our PocketQubes will reenter the atmosphere uncontrollably once orbital decay causes them to descend enough. The following orbital propagation analysis estimates the expected mission lifetimes based on three scenarios with varying initial altitudes. These simulations were performed using ESA's "OSCAR" tool, part of the DRAMA software package. A detailed list of the parameters used is provided below:
| Parameter | 450km scenario | 500km scenario | 550km scenario |
| Semi-major axis [km] | 6821 | 6871 | 6921 |
| Eccentricity | 1.00E-04 | 1.00E-04 | 1.00E-04 |
| Orbit inclination [º] | 98 | 98 | 98 |
| Cross-sectional area [m^2] | 0.005 | 0.005 | 0.005 |
| Drag coefficient | 2.2 | 2.2 | 2.2 |
| Mass [kg] | 0.234 | 0.234 | 0.234 |
| Solar radiation pressure reflectivity coefficient | 1.2 | 1.2 | 1.2 |
The semi-major axis values correspond to the scenarios mentioned earlier, which are also used in the Link Budget and assume possible initial orbit altitudes of 450 km, 500 km, and 550 km. A near-zero value has been selected for the eccentricity. For the cross-sectional area and coefficients, worst-case scenarios have been considered, as recommended by ESA experts.
Lastly, it is important to note that these simulations are based on a projected start date in Q3 2026, which is our current mission launch target. The tenth, eleventh, and twelfth graphs show the satellites' altitude over time, along with the estimated mission duration. This means the launch date needs to be adjusted depending on the specific expected launch date.
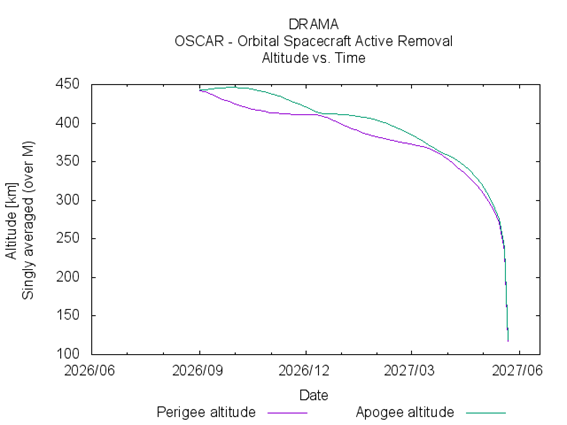
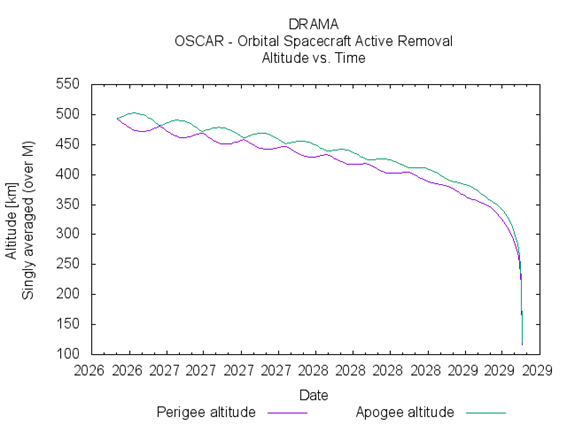
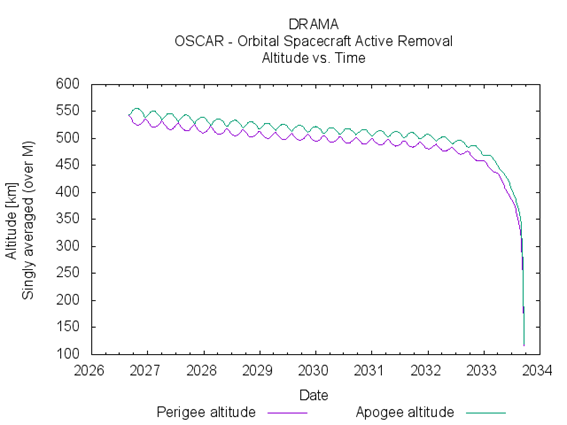
As seen in the three scenarios, initial altitudes below 550 km comply with ESA’s Zero Debris approach, while altitudes above 550 km do not meet the compliance criteria. In any case, launching at this altitude range would ensure that the satellites eventually reenter the atmosphere.
This considers the worst-case scenario where the antennas fail to deploy, resulting in a smaller cross-sectional area and therefore less drag than intended. Consequently, a deployment issue or satellite malfunction would not significantly impact the reentry time of the satellite.
Reentry
As outlined in earlier sections of the Space Debris Mitigation report, the constraints of the PocketQube mean that controlled reentry is not feasible. The mission does not plan for satellite recovery or reentry, so no heat shields or specialized designs have been employed to ensure the satellites’ survival during reentry.
Hazardous materials
The PocketQubes do not dispose of any fuel, as they do not have a propulsion system. However, they are equipped with a LiPo battery, which can be hazardous if exposed to extreme conditions. LiPo batteries can become explosive if damaged or overcharged, release toxic substances if breached, and pose a fire risk due to their flammable electrolyte.