Functional Architecture
The functional architecture of the spacecraft is defined by the different tasks or functions that each subsystem is designed to do. To this extent, all the operations done by the S/C can be categorized into the block diagram provided up next:
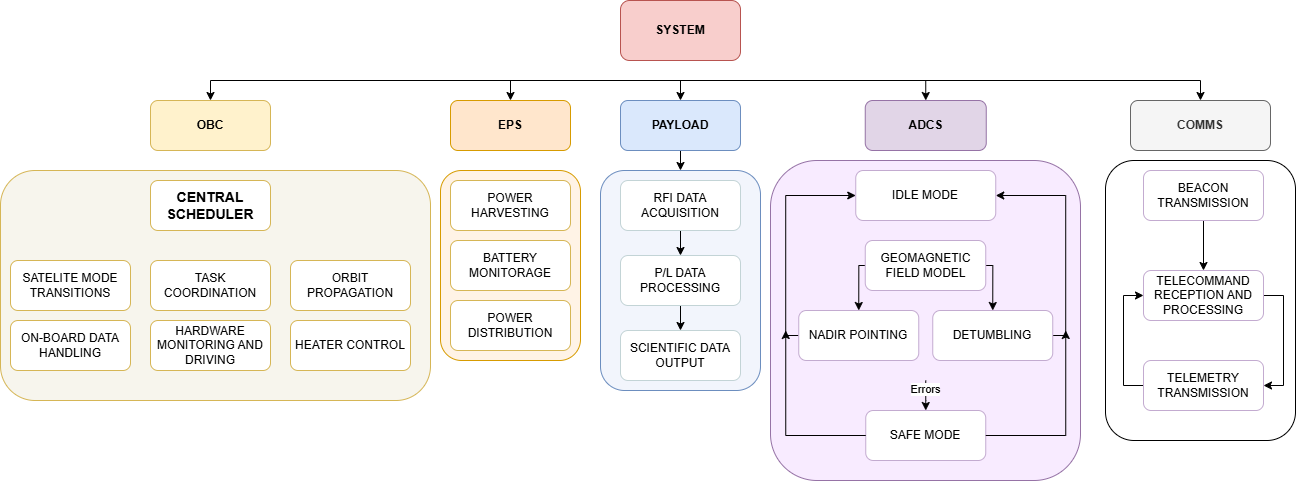
As it was done on the physical architecture explanation let's take a dive into the different parts in order to get a general overview. More information of each SS functionalities is found on their corresponding sections of the Wiki.
On-Board Computer (OBC)
The OBC is responsible for scheduling the different functions of the satelite. This is done through the coordination and control of software defined tasks programmed by the team. The OBC task itself is responsible of satelite mode transitions but the overall denominator of On-Board Software includes orbit propagation, housekeeping data management and On-Board data handling, heater control among other functionalities.
Electrical Power System (EPS)
The EPS is the subsystem responsible of power harvesting and maganagement, while also keeping track of the overall state of the required hardware and conditions to do so, mainly the battery. It will harvest energy through three solar arrays and distribute it to the rest of the system after conditioning the signal. During this process, should energy acquired be greater than the demands imposed by the system, it will charge the LiPo battery. Should the opposite happen, the subsystem is also responsible of discharging the battery and providing energy to the system.
Payload (P/L)
The Payload functionalities will differ greatly on the payload itself. In the ᴾᵒCat 2/3 case the payload will acquire and process RFI data that can be used for further scientific investigations. Other payloads design will find their functionalities confined to the tasks they are designed to perform.
Attitude Determination and Control System (ADCS)
The ADCS is responsible for two main functionalities. These are the nadir pointing (pointing the payload towards the Earth) and the detumbling (rotation stopping). During the process of performing these tasks other valuable byproducts are generated, such as magnetic field data and satelite orientation. The susbsytem will perform aformentioned tasks using a geomagnetic field model and the acquired sensor data.
Communications (COMMS)
The COMMS is responsible for telecommand reception, telemetry transmission and beacon transmission. Telecommands are instructions given the Ground Station (GS) to the satelite that indicate it to perform a certain task, be it taking a payload measure or calibrating the ADCS, among others. As telecommands are recieved it will be the system destined to process them and pass the corresponding instructions to the rest of the subsystems if required.
As mentioned before it will also periodically transmit beacons (depending on the state of the satelite) in order to send housekeeping data as well as a confirmation of overall correct state of the spacecraft.